在深空探测中主要采用卫星和探测机器人对天体表面和近地表面进行探测任务。深空探测可视化仿真系统主要根据卫星和探测机器人所拍摄的遥感图像信息构建虚拟的宇宙空间环境以及天体表面环境,并对卫星环绕飞行、探测机器人着陆以及地面巡视等过程进行仿真,同时支持着陆点与探测点选择,探测机器人各项规划等科学探测任务。
深空探测可视化仿真系统的工程应用主要包括三维视图、二维视图、图像预处理、图像匹配、地形构建、探测点定位、导航点定位、环境图分析、路径搜索、活动机构规划、规划验证等。
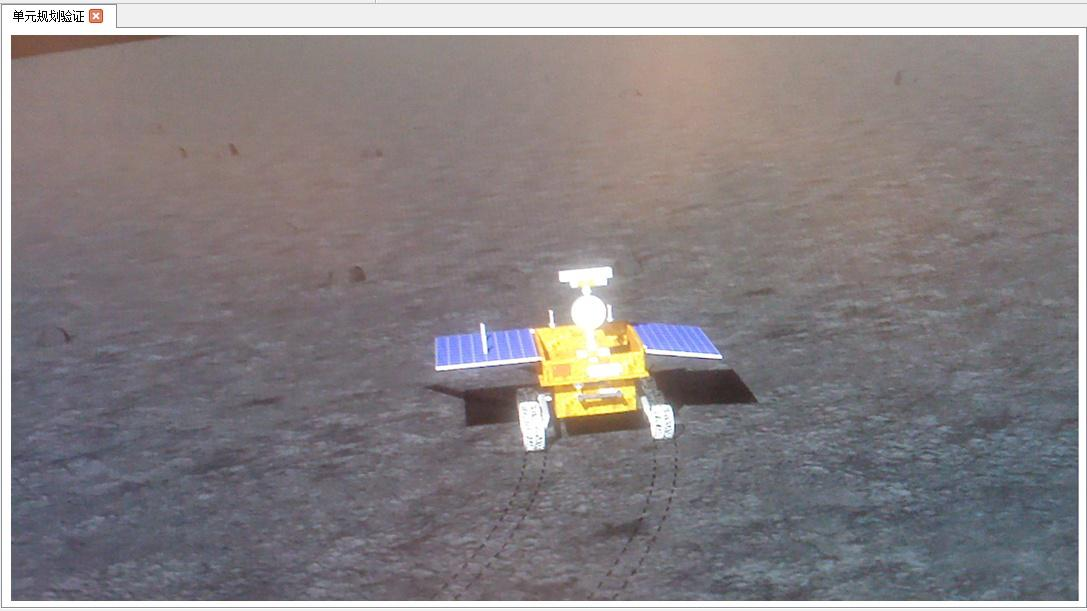
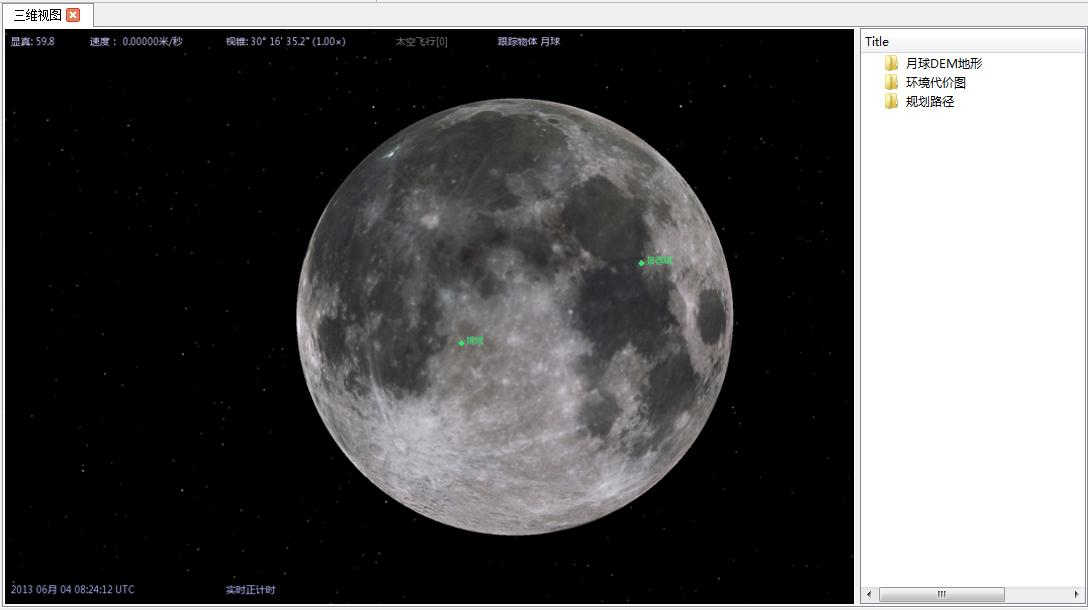
三维视图主要功能包括宇宙环境可视化、三维地形可视化、航天器可视化。其中,宇宙环境可视化实现地球、月球、太阳及星空的可视化;三维地形可视化实现利用全球高分辨率的高程数据和纹理数据对地球和月球表面的可视化;航天器可视化实现航天器根据实时数据、预示数据和规划数据驱动的可视化。
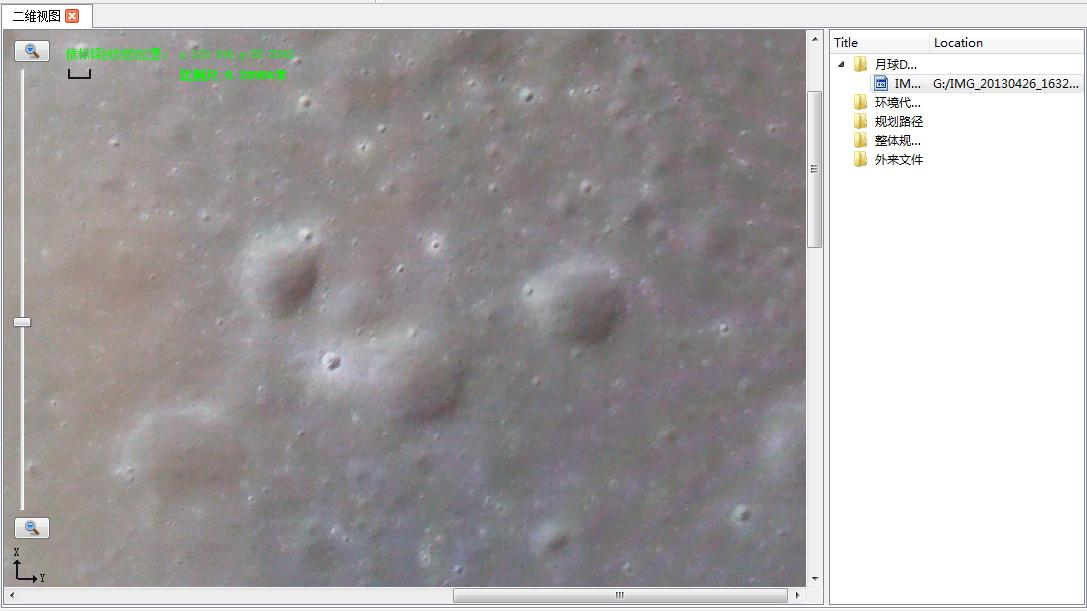
二维视图主要实现二维信息的显示,具有放大、缩小、平移的功能,并叠加显示经纬度或局部坐标系。其中,二维信息主要包括遥感图像、环境代价图(坡度图、法线图、光照图、等高线图等)、路径规划结果、任务规划结果以及规划验证结果等。
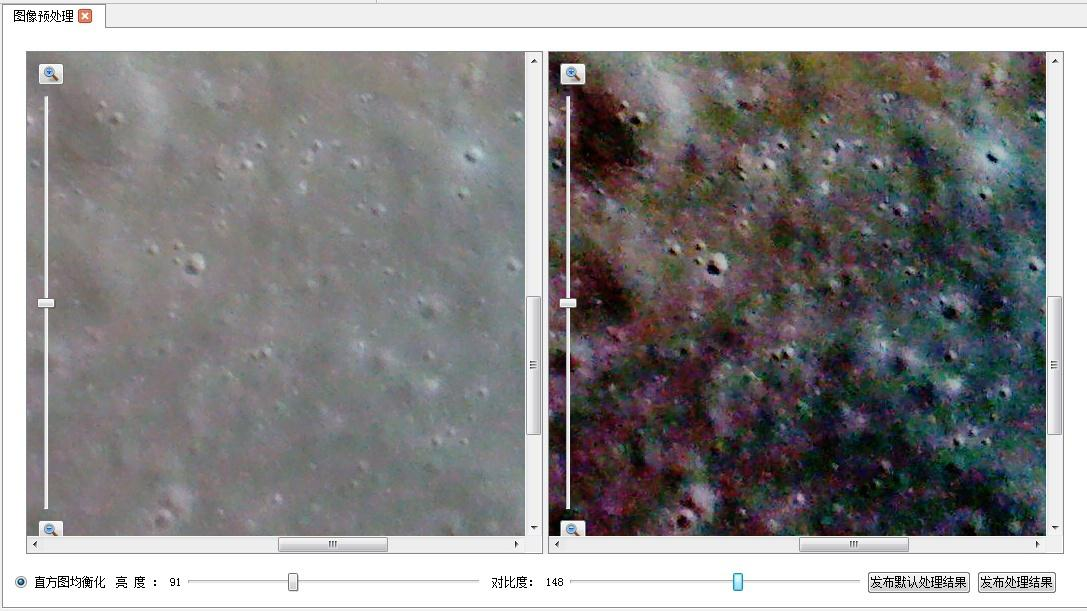
图像预处理主要增强图像中有关信息并消除图像中无关信息,从而获取图像有用的真实数据。处理过程包括数字化、归一化、平滑、复原和增强等步骤。
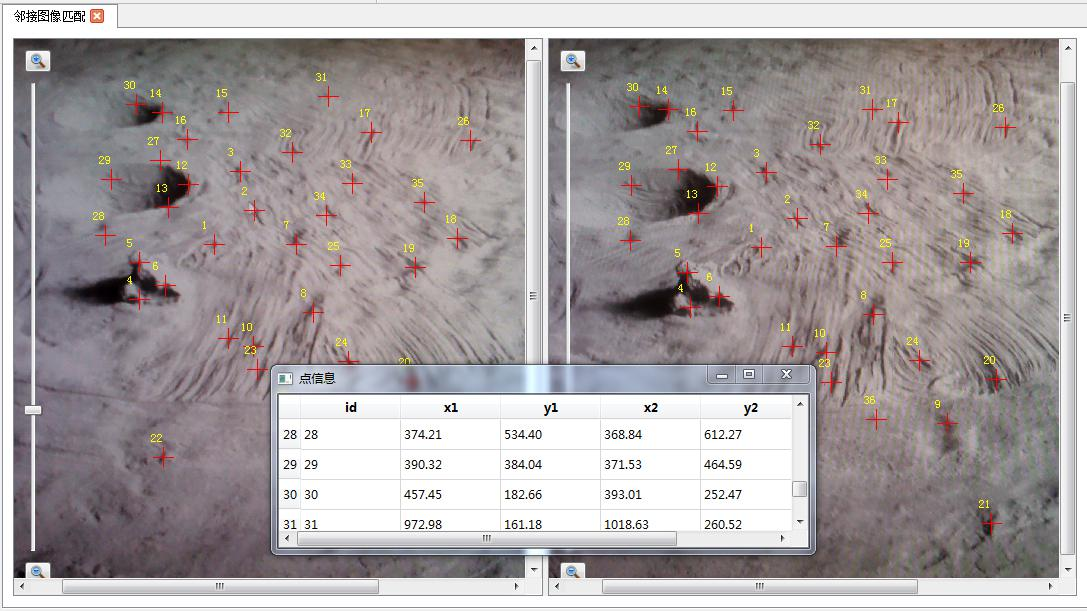
图像匹配主要功能是根据所提出的匹配方法对卫星和探测机器人的对地序列图像进行特征点匹配,并根据特征点的像素坐标在图像上进行显示,同时支持手动编辑匹配特征点。
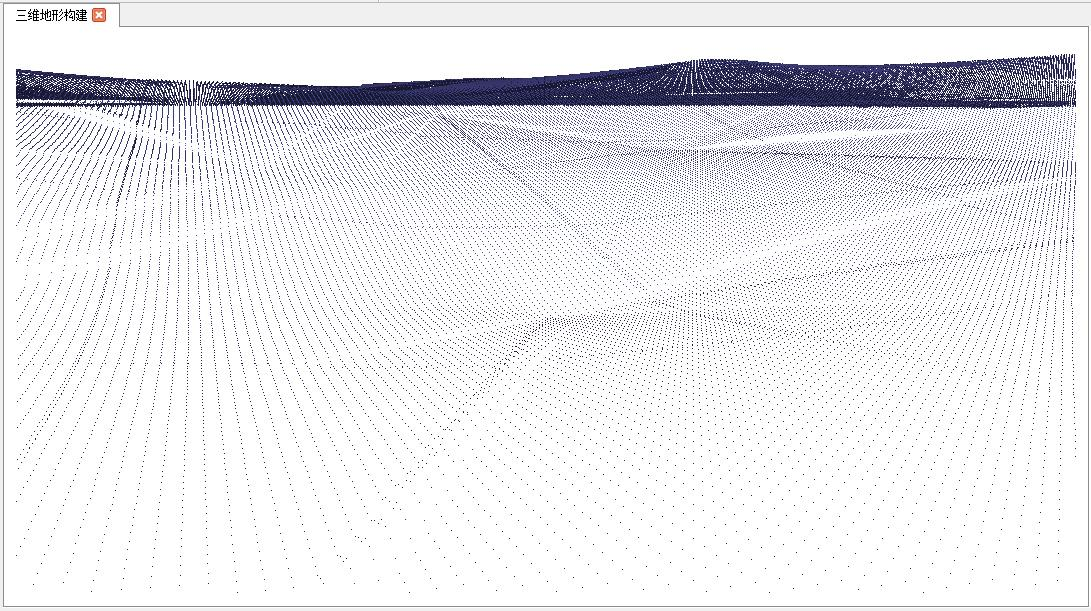
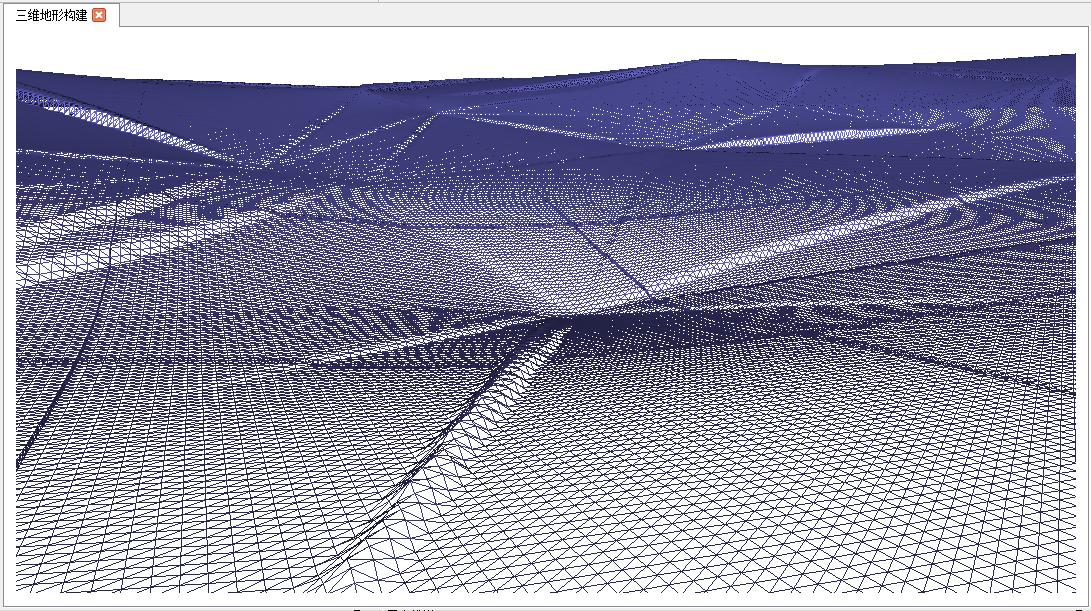
地形构建主要功能是以卫星和探测机器人所拍摄的遥感序列图像作为处理对象,根据图像匹配所得到的密集点匹配结果,通过分析解算得到目标区域的三维地形信息,并按三维点云、不规则三角网、规则格网的形式对三维地形信息进行显示。
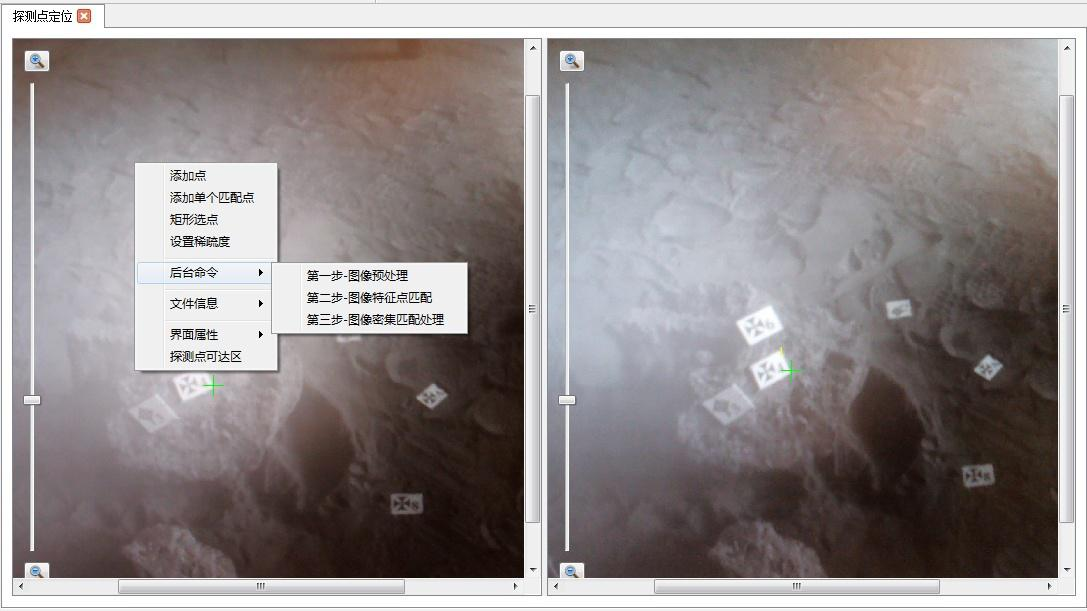
探测点定位是以探测机器人的避障相机所拍摄图像作为处理对象,根据图像匹配所得到的匹配结果,在成像系统位置信息已知的情况下,通过分析解算对探测点进行位置测量。
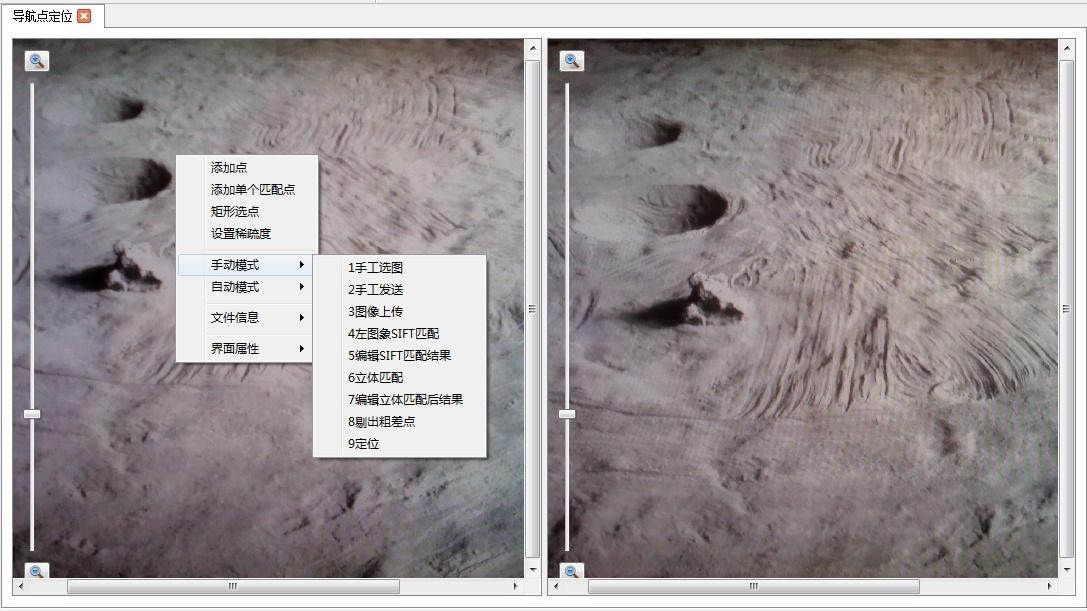
导航点定位是以探测机器人的导航相机所拍摄图像作为处理对象,根据图像匹配所得到的匹配结果,在成像系统位置信息已知的情况下,通过分析解算对导航点进行位置测量。
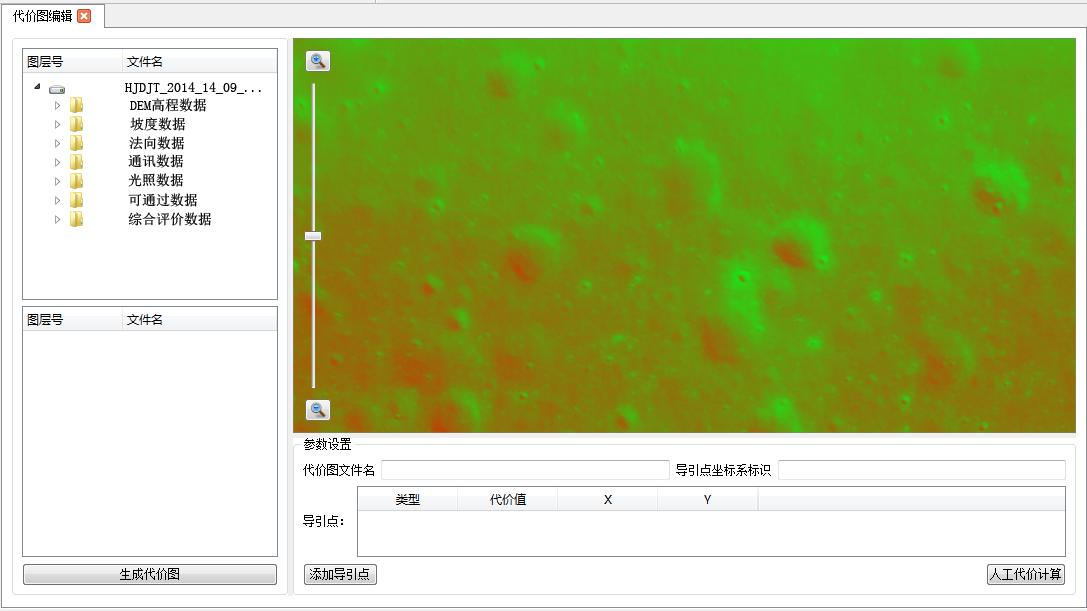
环境图分析主要功能是根据地形构建所恢复的三维地形,设置环境建模参数,如分辨率、通讯、光照等,生成环境代价图。环境代价图为多图层数据,主要包括三维地形信息、坡度图、法向图、障碍图、可通过图、通讯图、光照图以及综合评价图等。
路径搜索主要功能是根据环境代价图,设置搜索参数,如路径的起止点、路径点间隔距离、路径搜索算法、路径搜索策略、控制模式以及工作模式等,对路径进行搜索,并对环境代价图和规划路径进行显示,同时支持对规划路径的手动编辑。

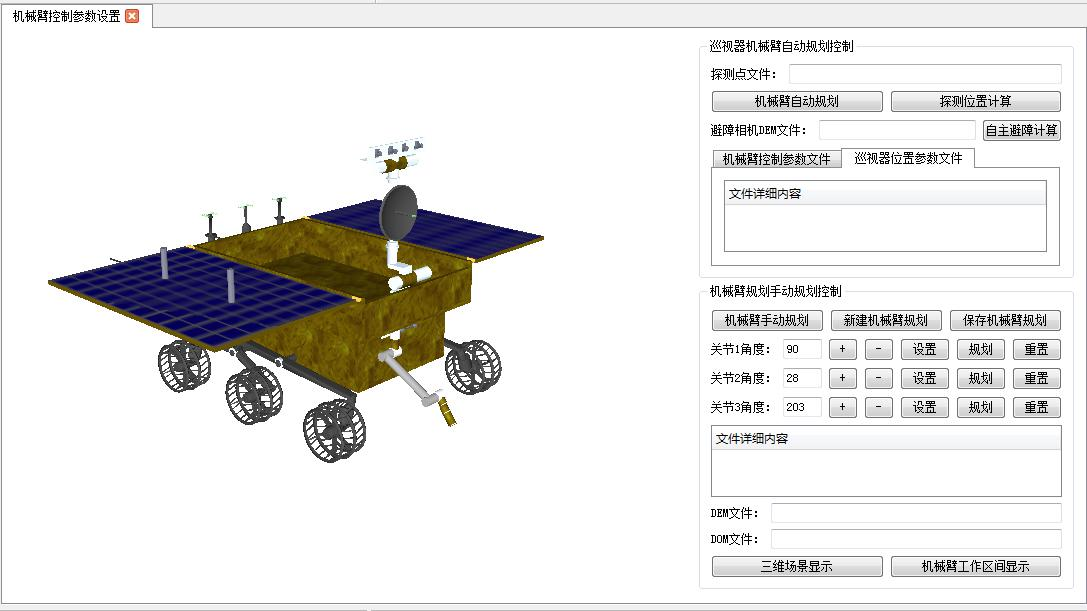
活动机构规划主要功能是对探测机器人的活动机构进行规划,主要包括-Y太阳翼、+Y太阳翼、桅杆、机械臂等,并支持三维显示和手动规划功能。
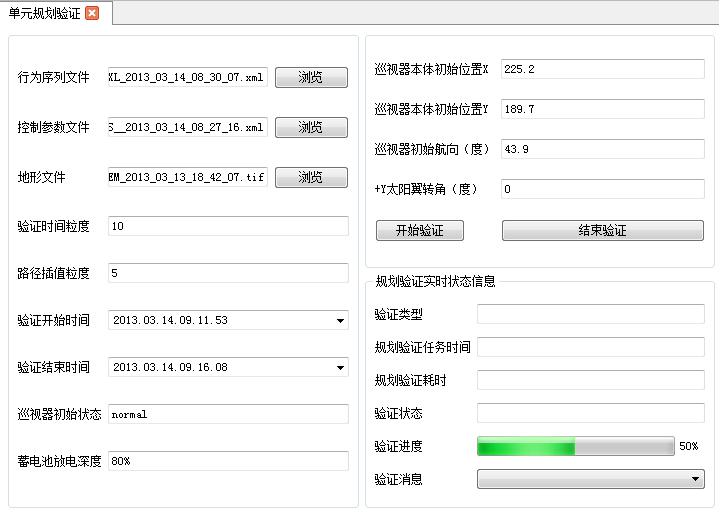
规划验证主要分别为周期规划验证、单元规划验证和遥控指令计划规划验证。